Cockroach Cyborgs Use Microphones to Detect, Trace Sounds
For Immediate Release
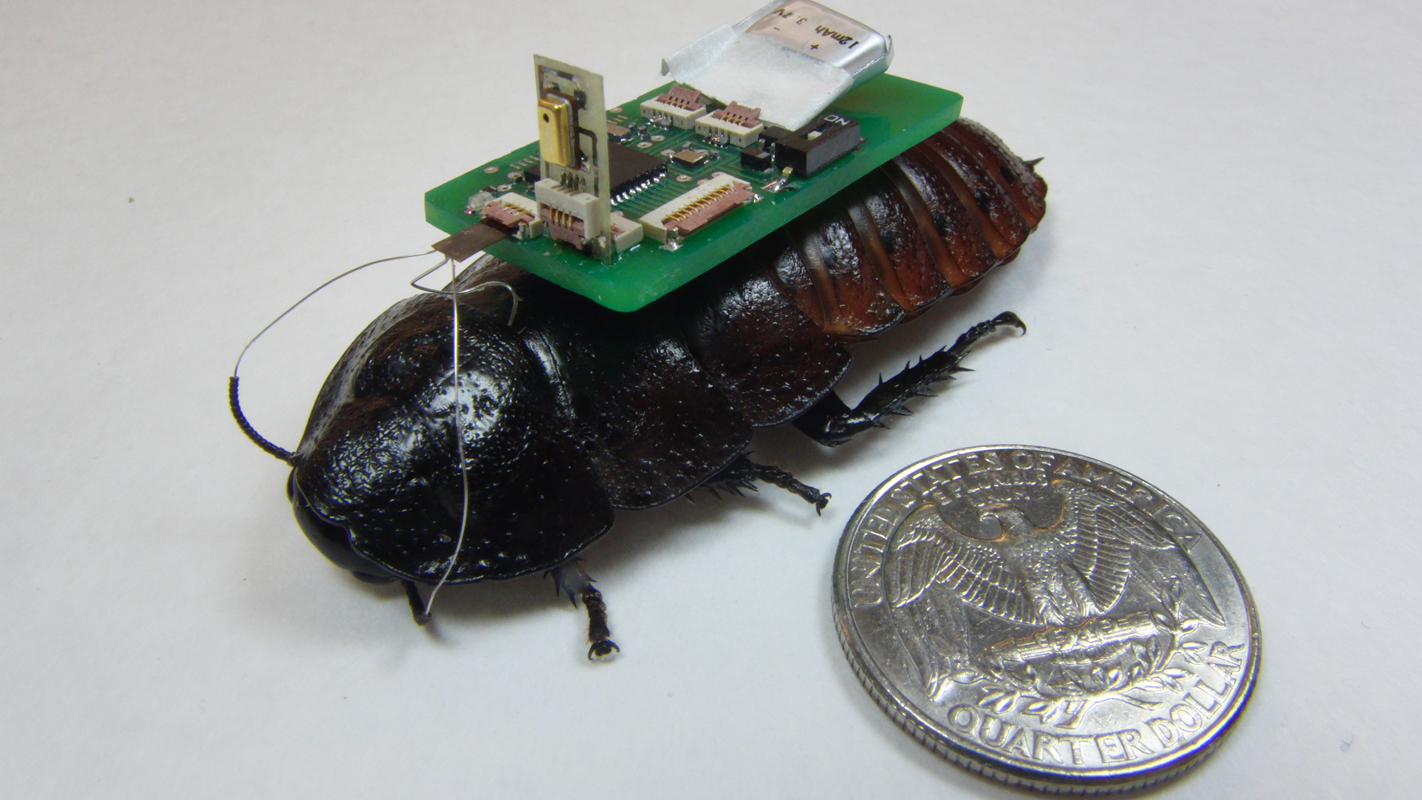
North Carolina State University researchers have developed technology that allows cyborg cockroaches, or biobots, to pick up sounds with small microphones and seek out the source of the sound. The technology is designed to help emergency personnel find and rescue survivors in the aftermath of a disaster.
The researchers have also developed technology that can be used as an “invisible fence” to keep the biobots in the disaster area.
“In a collapsed building, sound is the best way to find survivors,” says Dr. Alper Bozkurt, an assistant professor of electrical and computer engineering at NC State and senior author of two papers on the work.
The biobots are equipped with electronic backpacks that control the cockroach’s movements. Bozkurt’s research team has created two types of customized backpacks using microphones. One type of biobot has a single microphone that can capture relatively high-resolution sound from any direction to be wirelessly transmitted to first responders.
The second type of biobot is equipped with an array of three directional microphones to detect the direction of the sound. The research team has also developed algorithms that analyze the sound from the microphone array to localize the source of the sound and steer the biobot in that direction. The system worked well during laboratory testing. Video of a laboratory test of the microphone array system is available at http://www.youtube.com/watch?v=oJXEPcv-FMw.
“The goal is to use the biobots with high-resolution microphones to differentiate between sounds that matter – like people calling for help – from sounds that don’t matter – like a leaking pipe,” Bozkurt says. “Once we’ve identified sounds that matter, we can use the biobots equipped with microphone arrays to zero in on where those sounds are coming from.”
A research team led by Dr. Edgar Lobaton has previously shown that biobots can be used to map a disaster area. Funded by National Science Foundation CyberPhysical Systems Program, the long-term goal is for Bozkurt and Lobaton to merge their research efforts to both map disaster areas and pinpoint survivors. The researchers are already working with collaborator Dr. Mihail Sichitiu to develop the next generation of biobot networking and localization technology.
Bozkurt’s team also recently demonstrated technology that creates an invisible fence for keeping biobots in a defined area. This is significant because it can be used to keep biobots at a disaster site, and to keep the biobots within range of each other so that they can be used as a reliable mobile wireless network. This technology could also be used to steer biobots to light sources, so that the miniaturized solar panels on biobot backpacks can be recharged. Video of the invisible fence technology in practice can be seen at http://www.youtube.com/watch?v=mWGAKd7_fAM.
A paper on the microphone sensor research, “Acoustic Sensors for Biobotic Search and Rescue,” was presented Nov. 5 at the IEEE Sensors 2014 conference in Valencia, Spain. Lead author of the paper is Eric Whitmire, a former undergraduate at NC State. The paper was co-authored by Tahmid Latif, a Ph.D. student at NC State, and Bozkurt.
The paper on the invisible fence for biobots, “Towards Fenceless Boundaries for Solar Powered Insect Biobots,” was presented Aug. 28 at the 36th Annual International IEEE EMBS Conference in Chicago, Illinois. Latif was the lead author. Co-authors include Tristan Novak, a graduate student at NC State, Whitmire and Bozkurt.
The research was supported by the National Science Foundation under grant number 1239243.
-shipman-
Note to Editors: The study abstracts follow.
“Acoustic Sensors for Biobotic Search and Rescue”
Authors: Eric Whitmire, Tahmid Latif, and Alper Bozkurt, North Carolina State University
Presented: Nov. 5 at IEEE Sensors 2014, Valencia, Spain
Abstract: Advances in neural engineering have enabled direct control of insect locomotion. Insect biobots, with a natural ability to crawl through small spaces, offer unique advantages over traditional synthetic robots. A cyberphysical network of such biobots could prove useful for search and rescue applications in uncertain disaster environments. Our previous work has demonstrated control of Madagascar hissing cockroaches using a Kinect-based computer vision platform. We now demonstrate lowpower insect-mounted acoustic sensors for future use in both environmental mapping and localization of trapped survivors. Our experimentation has shown the capability of an insect mounted array of microphones to localize a sound source.
“Towards Fenceless Boundaries for Solar Powered Insect Biobots”
Authors: Tahmid Latif, Eric Whitmire, Tristan Novak, and Alper Bozkurt, North Carolina State University
Presented: Aug. 28 at 36th Annual International IEEE EMBS Conference, Chicago, Illinois
Abstract: Demonstration of remote navigation with instrumented insects, such as Madagascar Hissing Cockroach Gromphadorhina portentosa, has enabled the concept of biobotic agents for search and rescue missions and environmental monitoring applications. The biobots can form the nodes of a mobile sensor network to be established, for example, in unknown and dynamic environments after natural disasters to pinpoint surviving victims. We demonstrate here, for the first time, the concept of an invisible fence for insect biobots with an ultimate goal of keeping insect biobots within a certain distance of each other or a base station to ensure a reliable wireless network. For extended mission durations, this fenceless boundary would also be used to guide insects towards light sources for autonomous solar charging of their on-board batteries.
- Categories: