For Immediate Release
Researchers from North Carolina State University have created elastic, touch-sensitive fibers that can interface with electronic devices.
“Touch is a common way to interact with electronics using keyboards and touch screens,” says Michael Dickey, a professor of chemical and biomolecular engineering at NC State and corresponding author of a paper describing the work. “We have created soft and stretchable fibers that can detect touch, as well as strain and twisting. These microscopic fibers may be useful for integrating electronics in new places, including wearable devices.”
The new fibers are made of tube-like polymer strands that contain a liquid metal alloy, eutectic gallium and indium (EGaIn). The strands are only a few hundred microns in diameter, which is slightly thicker than a human hair.
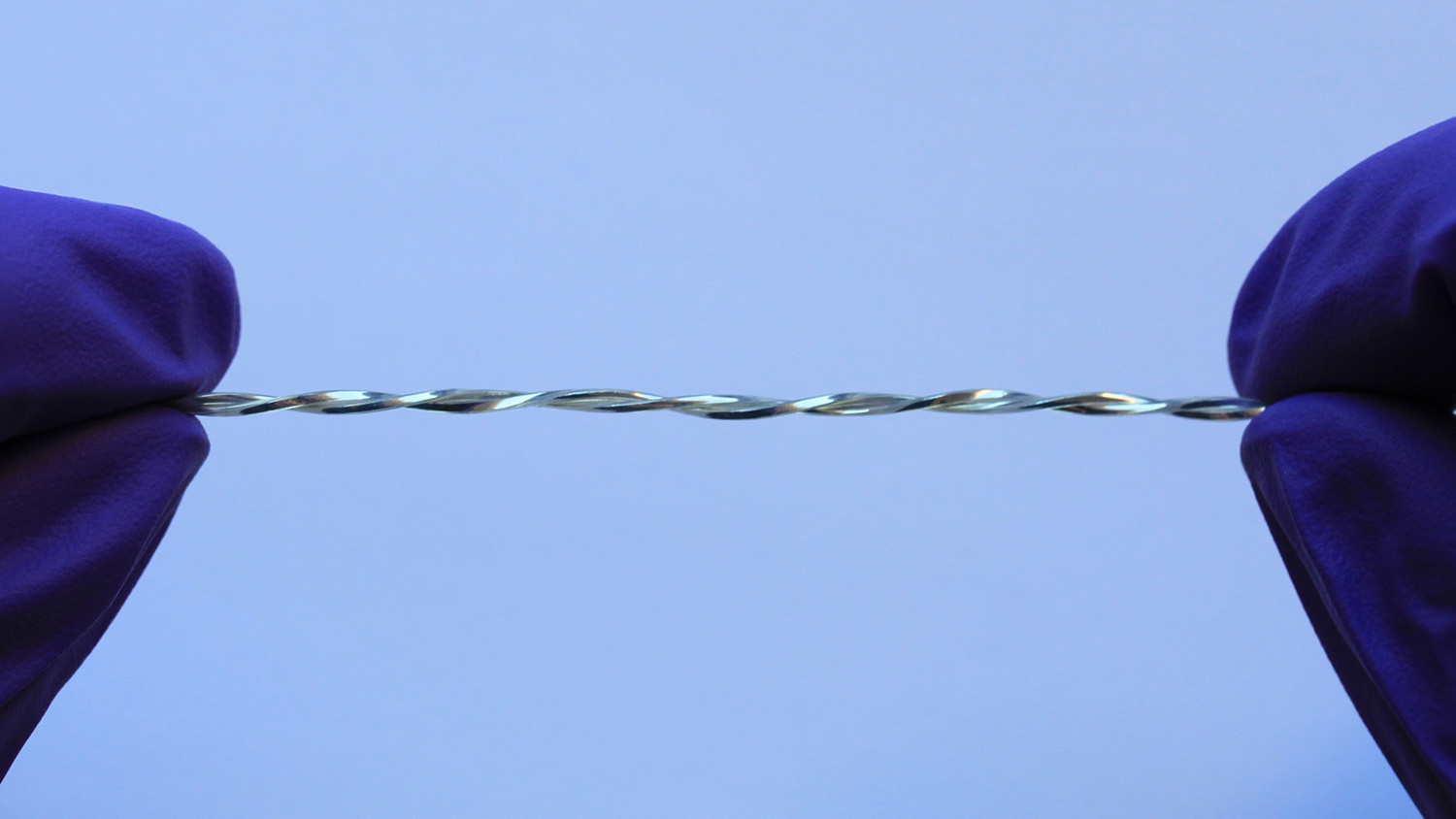
Each fiber consists of three strands. One is completely filled with EGaIn, one is two-thirds filled with EGaIn, and one is only one-third filled with EGaIn. The slim tubes are then twisted together into a tight spiral.
The touch-responsive fiber works because of capacitance, or the phenomenon in which electric charge is stored between two conductors separated by an insulator. For example, when your finger (which is a conductor) touches the screen of your smartphone (which is an insulator), it changes the capacitance between your finger and the electronic material beneath the screen. The smartphone’s technology then interprets that change in capacitance as a command to open an app or to type on the keypad.
Similarly, when your finger touches the elastic fiber, it changes the capacitance between your finger and the EGaIn inside the insulating polymer strands. By moving your finger along the fiber, the capacitance will vary, depending on how many of the strands contain EGaIn at that point in the fiber.
This effectively gives you the ability to send different electronic signals depending on which part of the fiber you touch. A video demonstrating the sensor can be seen at https://www.youtube.com/watch?v=arW21gazHQc.
The researchers also developed a sensor using two polymer strands, both of which are completely filled with EGaIn.
Again, the strands are twisted into a tight spiral. Increasing the number of twists elongates the elastic strands and brings the EGaIn in the two tubes closer together. This changes the capacitance between the two strands.
“We can tell how many times the fiber has been twisted based on the change in capacitance,” Dickey says. “That’s valuable for use in torsion sensors, which measure how many times, and how quickly, something revolves. The advantage of our sensor is that it is built from elastic materials and can therefore be twisted 100 times more – two orders of magnitude – than existing torsion sensors.”
The paper, “Stretchable Capacitive Sensors of Torsion, Strain, and Touch Using Double Helix Liquid Metal Fibers,” is published in the journal Advanced Functional Materials. Lead author of the paper is Christopher Cooper, an undergraduate at NC State. The paper was co-authored by Kuralamudhan Arutselvan, Daniel Armstrong, Yiliang Lin, and Mohammad Rashed Khan, who are Ph.D. students at NC State; by Ying Liu, a postdoctoral researcher at NC State; and by Jan Genzer, the S. Frank and Doris Culberson Distinguished Professor of Chemical and Biomolecular Engineering at NC State. The work was supported by Army Natick under grant number W911QY-14-C-0033.
-shipman-
Note to Editors: The study abstract follows.
“Stretchable Capacitive Sensors of Torsion, Strain, and Touch Using Double Helix Liquid Metal Fibers”
Authors: Christopher B. Cooper, Kuralamudhan Arutselvan, Ying Liu, Daniel Armstrong, Yiliang Lin, Mohammad Rashed Khan, Jan Genzer, and Michael D. Dickey, North Carolina State University
Published: March 23, Advanced Functional Materials
DOI: 10.1002/adfm.201605630
Abstract: Soft and stretchable sensors have the potential to be incorporated into soft robotics and conformal electronics. Liquid metals represent a promising class of materials for creating these sensors because they can undergo large deformations while retaining electrical continuity. Incorporating liquid metal into hollow elastomeric capillaries results in fibers that can integrate with textiles, comply with complex surfaces, and be mass produced at high speeds. Liquid metal is injected into the core of hollow and extremely stretchable elastomeric fibers and the resulting fibers are intertwined into a helix to fabricate capacitive sensors of torsion, strain, and touch. Twisting or elongating the fibers changes the geometry and, thus, the capacitance between the fibers in a predictable way. These sensors offer a simple mechanism to measure torsion up to 800 rad m?1—two orders of magnitude higher than current torsion sensors. These intertwined fibers can also sense strain capacitively. In a complementary embodiment, the fibers are injected with different lengths of liquid metal to create sensors capable of distinguishing touch along the length of a small bundle of fibers via self-capacitance. The three capacitive-based modes of sensing described here may enable new sensing applications that employ the unique attributes of stretchable fibers.
- Categories:


