For Immediate Release
When amputees receive powered prosthetic legs, the power of the prosthetic limbs needs to be tuned by a prosthetics expert so that a patient can move normally – but the prosthetic often needs repeated re-tuning. Biomedical engineering researchers at North Carolina State University and the University of North Carolina at Chapel Hill have now developed software that allows powered prosthetics to tune themselves automatically, making the devices more functionally useful and lowering the costs associated with powered prosthetic use.
“When a patient gets a powered prosthetic, it needs to be customized to account for each individual patient’s physical condition, because people are different in size and strength. And that tuning is done by a prosthetist,” says Helen Huang, lead author of a paper on the work and an associate professor in the biomedical engineering program at NC State and UNC-Chapel Hill. “In addition, people are dynamic – a patient’s physical condition may change as he or she becomes accustomed to a prosthetic leg, for example, or they may gain weight. These changes mean the prosthetic needs to be re-tuned, and working with a prosthetist takes time and money.”
To address this problem, the researchers developed an algorithm that can be incorporated into the software of any powered prosthesis to automatically tune the amount of power a prosthetic limb needs in order for a patient to walk comfortably. The algorithm would not only make it easier for patients to walk while reducing prosthetist-related costs, but would also allow a prosthesis to adjust to changing conditions. Video of the technology in action can be seen here.
“For example, the algorithm could provide more power to a prosthesis when a patient carries a heavy suitcase through an airport,” Huang says.
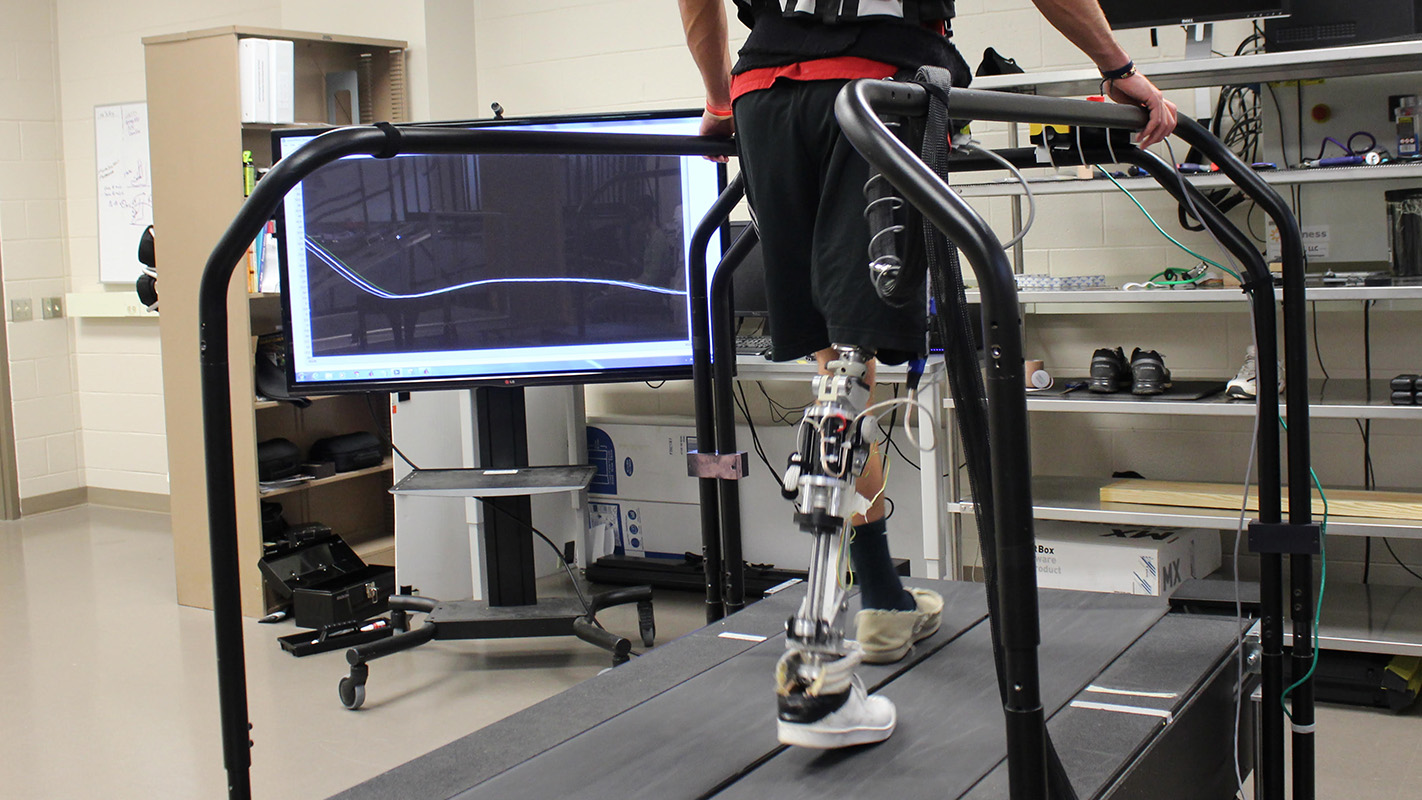
The system works by taking into account the angle of the prosthetic knee while walking.
Powered prosthetic legs are programmed so that the angle of the prosthetic joints – the knee or ankle – while walking mimics the normal movement of the joints when an able-bodied person is walking. During the conventional prosthetic tuning process, a prosthetist adjusts the powered prosthesis’s system so that it exerts the power necessary to recreate those normal joint motions while walking.
But changes in a person’s weight, or gait, can affect the prosthesis’s ability to achieve that “natural” joint angle.
The automatic-tuning algorithm takes a similar approach, tracking the angle of the prosthetic joint while walking. But it is able to adjust the amount of power the prosthesis receives in real time, in order to maintain the proper angle.
“In testing, we found that the computer – using the algorithm – performed better than prosthetists at achieving the proper joint angle,” Huang says. “So we know our approach works. But we’re still working to make it better.
“Prosthetists rely on years of experience to not only adjust the joint angle, but to adjust a prosthesis to help patients maintain a comfortable posture while walking,” Huang adds. “We’re not yet able to replicate the prosthetist’s success in achieving those comfortable ‘trunk motions,’ but it’s something we’re working on.”
The paper, “A Cyber Expert System for Auto-Tuning Powered Prosthesis Impedance Control Parameters,” is published in the journal Annals of Biomedical Engineering. The paper was co-authored by Dustin Crouch, Ming Liu, Gregory Sawicki and Ding Wang, of the joint biomedical engineering program at NC State and UNC-Chapel Hill. The work was supported by the National Science Foundation under grants 1361549, 1406750, and 1527202.
-shipman-
Note to Editors: The study abstract follows.
“A Cyber Expert System for Auto-Tuning Powered Prosthesis Impedance Control Parameters”
Authors: He Huang, Dustin L. Crouch, Ming Liu, Gregory S. Sawicki and Ding Wang, North Carolina State University and the University of North Carolina at Chapel Hill.
Published: Sept. 25, Annals of Biomedical Engineering
DOI: 10.1007/s10439-015-1464-7
Abstract: Typically impedance control parameters (e.g. stiffness and damping) in powered lower limb prostheses are fine-tuned by human experts, which is time and resource intensive. Automated tuning procedures would make powered prostheses more practical for clinical use. In this study, we developed a novel cyber expert system (CES) that encoded human expert (HME) tuning decisions as computer rules to auto-tune control parameters for a powered knee (passive ankle) prosthesis. The tuning performance of CES was preliminarily quantified on two able-bodied subjects and two transfemoral amputees. After CES and HME tuning, we observed normative prosthetic knee kinematics and improved or slightly improved gait symmetry and step width within each subject. Compared to HME, the CES tuning procedure required less time and no human intervention. Hence, using CES for auto-tuning prosthesis control was a sound concept, promising to enhance the practical value of powered prosthetic legs. However, the tuning goals of CES might not fully capture those of the human expert. This was because we observed that HME tuning reduced trunk sway, while CES sometimes led to slightly increased trunk motion. Additional research is still needed to identify more appropriate tuning objectives for powered prosthetic legs to improve amputees’ walking function.
- Categories:


