‘Soft Tactile Logic’ Tech Distributes Decision-Making Throughout Stretchable Material
For Immediate Release
Inspired by octopuses, researchers have developed a structure that senses, computes and responds without any centralized processing – creating a device that is not quite a robot and not quite a computer, but has characteristics of both. The new technology holds promise for use in a variety of applications, from soft robotics to prosthetic devices.
“We call this ‘soft tactile logic,’ and have developed a series of prototypes demonstrating its ability to make decisions at the material level – where the sensor is receiving input – rather than relying on a centralized, semiconductor-based logic system,” says Michael Dickey, co-corresponding author of a paper on the work and Alcoa Professor of Chemical and Biomolecular Engineering at North Carolina State University.
“Our approach was inspired by octopuses, which have a centralized brain, but also have significant neuronal structures throughout their arms. This raises the possibility that the arms can ‘make decisions’ based on sensory input, without direct instruction from the brain.”
At the core of the soft tactile logic prototypes is a common structure: pigments that change color at different temperatures, mixed into a soft, stretchable silicone form. That pigmented silicone contains channels that are filled with metal that is liquid at room temperature, effectively creating a squishy wire nervous system.
Pressing or stretching the silicone deforms the liquid metal, which increases its electrical resistance, raising its temperature as current passes through it. The higher temperature triggers color change in the surrounding temperature-sensitive dyes. In other words, the overall structure has a tunable means of sensing touch and strain. Video of the technology can be seen here.
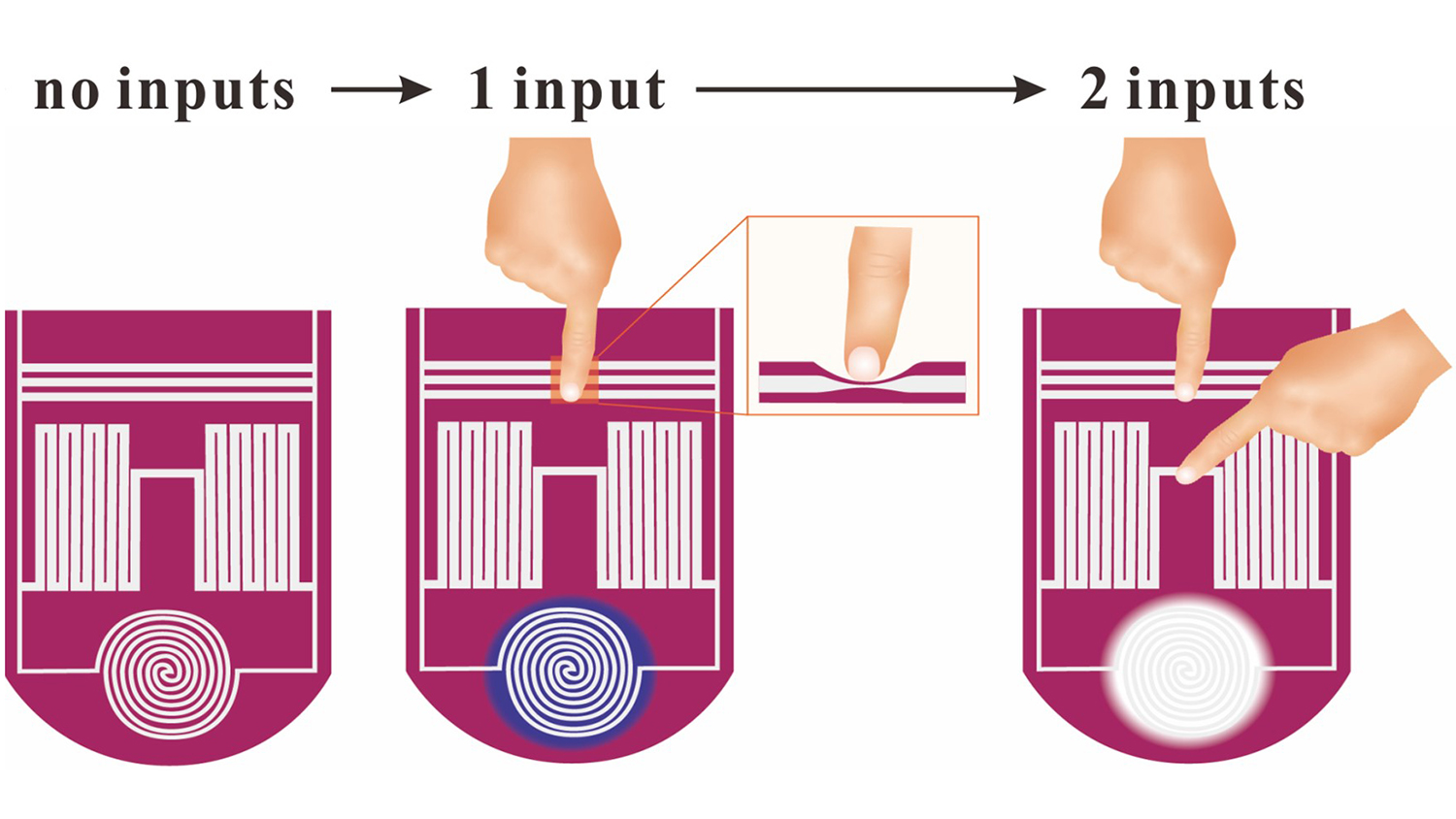
The researchers also developed soft tactile logic prototypes in which this same action – deforming the liquid metal by touch – redistributes electrical energy to other parts of the network, causing material to change colors, activating motors or turning on lights. Touching the silicone in one spot creates a different response than touching in two spots; in this way, the system carries out simple logic in response to touch.
“This is a proof of concept that demonstrates a new way of thinking about how we can engineer decision-making into soft materials,” Dickey says.
“There are living organisms that can make decisions without relying on a rigid centralized processor. Mimicking that paradigm, we’ve shown materials-based, distributed logic using entirely soft materials.”
The researchers are currently exploring ways to make more complex soft circuits, inspired by the sophisticated sensors and actuators found in biological systems.
The paper, “Materials tactile logic via innervated soft thermochromic elastomers,” is published in the journal Nature Communications.
First author of the paper is Yang Jin, a former visiting scholar at NC State and former Ph.D. student at Jiangnan University. Co-corresponding author of the paper is Mingqiao Ge of Jiangnan University. The paper was co-authored by Yiliang Lin and Ishan Joshipura, former Ph.D. students at NC State; and Abolfazi Kiani, a visiting professor at NC State who is also on faculty at the University of Isfahan.
-shipman-
Note to Editors: The study abstract follows.
“Materials tactile logic via innervated soft thermochromic elastomers”
Authors: Yang Jin and Mingqiao Ge, Jiangnan University; Yiliang Lin, Ishan D. Joshipura and Michael D. Dickey, North Carolina State University; Abolfazi Kiani, North Carolina State University and University of Isfahan
Published: Sept. 13, Nature Communications
DOI: 10.1038/s41467-019-12161-1
Abstract: Conventional machines rely on rigid, centralized electronic components to make decisions, which limits complexity and scaling. Here, we show that decision making can be realized on the material-level without relying on semiconductor-based logic. Inspired by the distributed decision making that exists in the arms of an octopus, we present a completely soft, stretchable silicone composite doped with thermochromic pigments and innervated with liquid metal. The ability to deform the liquid metal couples geometric changes to Joule heating, thus enabling tunable thermo-mechanochromic sensing of touch and strain. In more complex circuits, deformation of the metal can redistribute electrical energy to distal portions of the network in a way that converts analog tactile ‘inputs’ into digital colorimetric ‘outputs’. Using the material itself as the active player in the decision making process offers possibilities for creating entirely soft devices that respond locally to environmental interactions or act as embedded sensors for feedback loops.
- Categories:


