Technique Uses Magnets, Light to Control and Reconfigure Soft Robots
For Immediate Release
Researchers from North Carolina State University and Elon University have developed a technique that allows them to remotely control the movement of soft robots, lock them into position for as long as needed and later reconfigure the robots into new shapes. The technique relies on light and magnetic fields.
“We’re particularly excited about the reconfigurability,” says Joe Tracy, a professor of materials science and engineering at NC State and corresponding author of a paper on the work. “By engineering the properties of the material, we can control the soft robot’s movement remotely; we can get it to hold a given shape; we can then return the robot to its original shape or further modify its movement; and we can do this repeatedly. All of those things are valuable, in terms of this technology’s utility in biomedical or aerospace applications.”
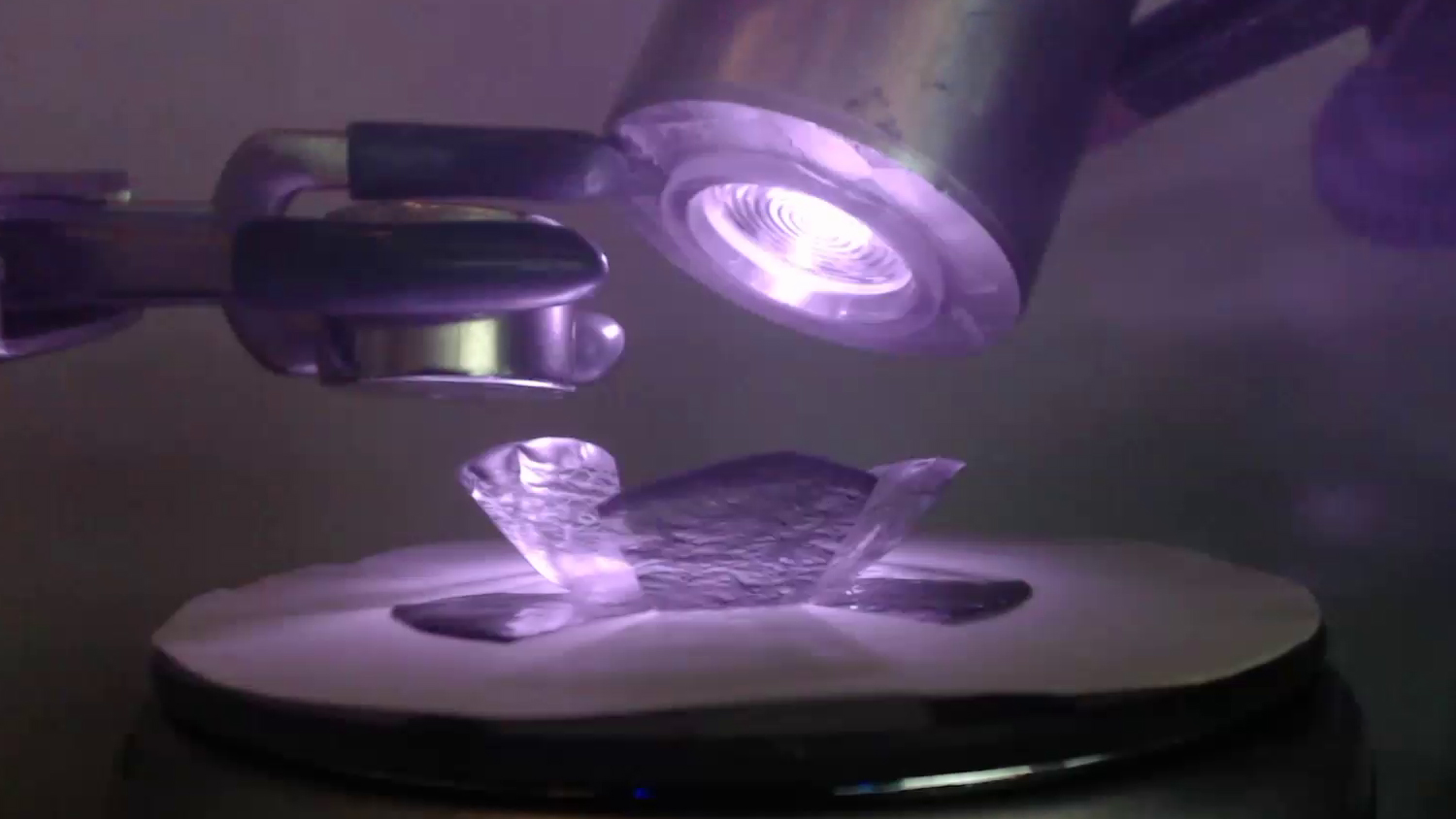
For this work, the researchers used soft robots made of a polymer embedded with magnetic iron microparticles. Under normal conditions, the material is relatively stiff and holds its shape. However, researchers can heat up the material using light from a light-emitting diode (LED), which makes the polymer pliable. Once pliable, researchers demonstrated that they could control the shape of the robot remotely by applying a magnetic field. After forming the desired shape, researchers could remove the LED light, allowing the robot to resume its original stiffness – effectively locking the shape in place.
By applying the light a second time and removing the magnetic field, the researchers could get the soft robots to return to their original shapes. Or they could apply the light again and manipulate the magnetic field to move the robots or get them to assume new shapes.
In experimental testing, the researchers demonstrated that the soft robots could be used to form “grabbers” for lifting and transporting objects. The soft robots could also be used as cantilevers, or folded into “flowers” with petals that bend in different directions.
“We are not limited to binary configurations, such as a grabber being either open or closed,” says Jessica Liu, first author of the paper and a Ph.D. student at NC State. “We can control the light to ensure that a robot will hold its shape at any point.”
In addition, the researchers developed a computational model that can be used to streamline the soft robot design process. The model allows them to fine-tune a robot’s shape, polymer thickness, the abundance of iron microparticles in the polymer, and the size and direction of the required magnetic field before constructing a prototype to accomplish a specific task.
“Next steps include optimizing the polymer for different applications,” Tracy says. “For example, engineering polymers that respond at different temperatures in order to meet the needs of specific applications.”
The paper, “Photothermally and Magnetically Controlled Reconfiguration of Polymer Composites for Soft Robotics,” appears in the journal Science Advances. The paper was co-authored by Jonathan Gillen, a former undergraduate at NC State; Sumeet Mishra, a former Ph.D. student at NC State; and Benjamin Evans, an associate professor of physics at Elon University.
The work was done with support from the National Science Foundation (NSF) under grants CMMI-1663416 and CMMI-1662641. The work was also supported by the Research Triangle MRSEC, which is funded by NSF under grant DMR-1121107; and by NC State’s Analytical Instrumentation Facility and the Duke University Shared Materials Instrumentation Facility, which are supported by the State of North Carolina and NSF grant ECCS-1542015.
-shipman-
Note to Editors: The study abstract follows.
“Photothermally and Magnetically Controlled Reconfiguration of Polymer Composites for Soft Robotics”
Authors: Jessica A.-C. Liu, Jonathan H. Gillen, Sumeet R. Mishra and Joseph B. Tracy, North Carolina State University; and Benjamin A. Evans, Elon University
Published: Aug. 2, Science Advances
DOI: 10.1126/sciadv.aaw2897
Abstract: New materials are advancing the field of soft robotics. Composite films of magnetic iron microparticles dispersed in a shape memory polymer matrix are demonstrated for reconfigurable, remotely actuated soft robots. The composite films simultaneously respond to magnetic fields and light. Temporary shapes obtained through combined magnetic actuation and photothermal heating can be locked by switching off the light and magnetic field. Subsequent illumination in the absence of the magnetic field drives recovery of the permanent shape. In cantilevers and flowers, multiple cycles of locking and unlocking are demonstrated. Scrolls show that the permanent shape of the film can be programmed, and they can be frozen in intermediate configurations. Bistable snappers can be magnetically and optically actuated, as well as biased, by controlling the permanent shape. Grabbers can pick up and release objects repeatedly. Simulations of combined photothermal heating and magnetic actuation are useful for guiding the design of new devices.
- Categories:


