For Immediate Release
Researchers at North Carolina State University have developed a combination of software and hardware that will allow them to use unmanned aerial vehicles (UAVs) and insect cyborgs, or biobots, to map large, unfamiliar areas – such as collapsed buildings after a disaster.
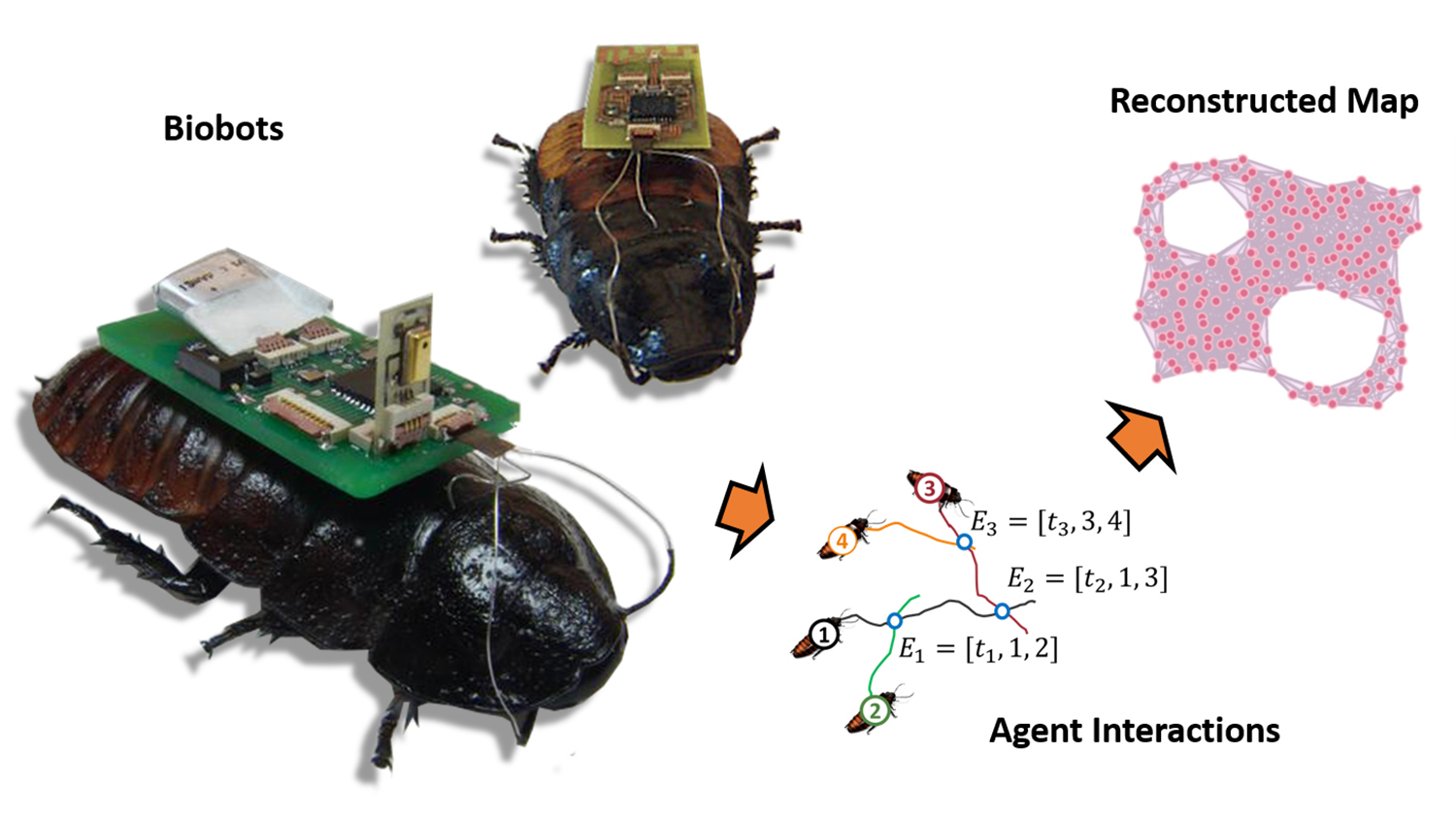
“The idea would be to release a swarm of sensor-equipped biobots – such as remotely controlled cockroaches – into a collapsed building or other dangerous, unmapped area,” says Edgar Lobaton, an assistant professor of electrical and computer engineering at NC State and co-author of two papers describing the work.
“Using remote-control technology, we would restrict the movement of the biobots to a defined area,” Lobaton says. “That area would be defined by proximity to a beacon on a UAV. For example, the biobots may be prevented from going more than 20 meters from the UAV.”
The biobots would be allowed to move freely within a defined area and would signal researchers via radio waves whenever they got close to each other. Custom software would then use an algorithm to translate the biobot sensor data into a rough map of the unknown environment.
Once the program receives enough data to map the defined area, the UAV moves forward to hover over an adjacent, unexplored section. The biobots move with it, and the mapping process is repeated. The software program then stitches the new map to the previous one. This can be repeated until the entire region or structure has been mapped; that map could then be used by first responders or other authorities.
“This has utility for areas – like collapsed buildings – where GPS can’t be used,” Lobaton says. “A strong radio signal from the UAV could penetrate to a certain extent into a collapsed building, keeping the biobot swarm contained. And as long as we can get a signal from any part of the swarm, we are able to retrieve data on what the rest of the swarm is doing. Based on our experimental data, we know you’re going to lose track of a few individuals, but that shouldn’t prevent you from collecting enough data for mapping.”
Co-lead author Alper Bozkurt, an associate professor of electrical and computer engineering at NC State, has previously developed functional cockroach biobots. However, to test their new mapping technology, the research team relied on inch-and-a-half-long robots that simulate cockroach behavior.
In their experiment, researchers released these robots into a maze-like space, with the effect of the UAV beacon emulated using an overhead camera and a physical boundary attached to a moving cart. The cart was moved as the robots mapped the area. (Video from the experiment is available at https://www.youtube.com/watch?v=OWnrGsJEw6s&feature=youtu.be.)
“We had previously developed proof-of-concept software that allowed us to map small areas with biobots, but this work allows us to map much larger areas and to stitch those maps together into a comprehensive overview,” Lobaton says. “It would be of much more practical use for helping to locate survivors after a disaster, finding a safe way to reach survivors, or for helping responders determine how structurally safe a building may be.
“The next step is to replicate these experiments using biobots, which we’re excited about.”
An article on the framework for developing local maps and stitching them together, “A Framework for Mapping with Biobotic Insect Networks: From Local to Global Maps,” is published in Robotics and Autonomous Systems. An article on the theory of mapping based on the proximity of mobile sensors to each other, “Geometric Learning and Topological Inference with Biobotic Networks,” is published in IEEE Transactions on Signal and Information Processing over Networks. The third co-lead author on both papers is Alireza Dirafzoon, a former Ph.D. student at NC State. The work was supported by the National Science Foundation under grant CNS-1239243.
-shipman-
Note to Editors: The study abstracts follow.
“A Framework for Mapping with Biobotic Insect Networks: From Local to Global Maps”
Authors: Alireza Dirafzoon, Alper Bozkurt and Edgar Lobaton, North Carolina State University
Published: Nov. 11, Robotics and Autonomous Systems
DOI: 10.1016/j.robot.2016.11.004
Abstract: We present an approach for exploration and mapping of unknown environments using a swarm of cyborg insects, known as biobots, for emergency response scenarios under minimal sensing and localization constraints. We exploit natural stochastic motion models and controlled locomotion of biobots in conjunction with an aerial leader to explore and map a domain of interest. A sliding window strategy is adopted to construct local maps from coordinate free encounter information of the agents by means of local metric estimation. Robust topological features from these local representations are extracted using topological data analysis and a classification scheme. These maps are then merged into a global map which can be visualized using a graphical representation that integrates geometric as well as topological features of the environment. Simulation and experimental results with biologically inspired robotic platform are presented to illustrate and verify the correctness of our approach, which provides building blocks for SLAM with biobotic insects.
“Geometric Learning and Topological Inference with Biobotic Networks”
Authors: Alireza Dirafzoon, Alper Bozkurt and Edgar Lobaton, North Carolina State University
Published: Oct. 28, IEEE Transactions on Signal and Information Processing Over Networks
DOI: 10.1109/TSIPN.2016.2623093
Abstract: In this study, we present and analyze a framework for geometric and topological estimation for mapping of unknown environments. We consider agents mimicking motion behaviors of cyborg insects, known as biobots, and exploit coordinate-free local interactions among them to infer geometric and topological information about the environment, under minimal sensing and localization constraints. A geometric estimation procedure is presented over a graphical representation referred to as the encounter graph in order to construct a geometric point cloud using manifold learning techniques. Topological data analysis (TDA) along with the proposed classification method are used to infer robust topological features of the space (e.g. existence of obstacles). We examine the asymptotic behavior of the proposed metric in terms of the convergence to the geodesic distances in the underlying manifold of the domain, and provide stability analysis results for the topological persistence. The proposed framework and its convergences and stability analysis are demonstrated through numerical simulations and experiments with Hexbugs.
- Categories:


